PRODUCTS
高清洁传送系统
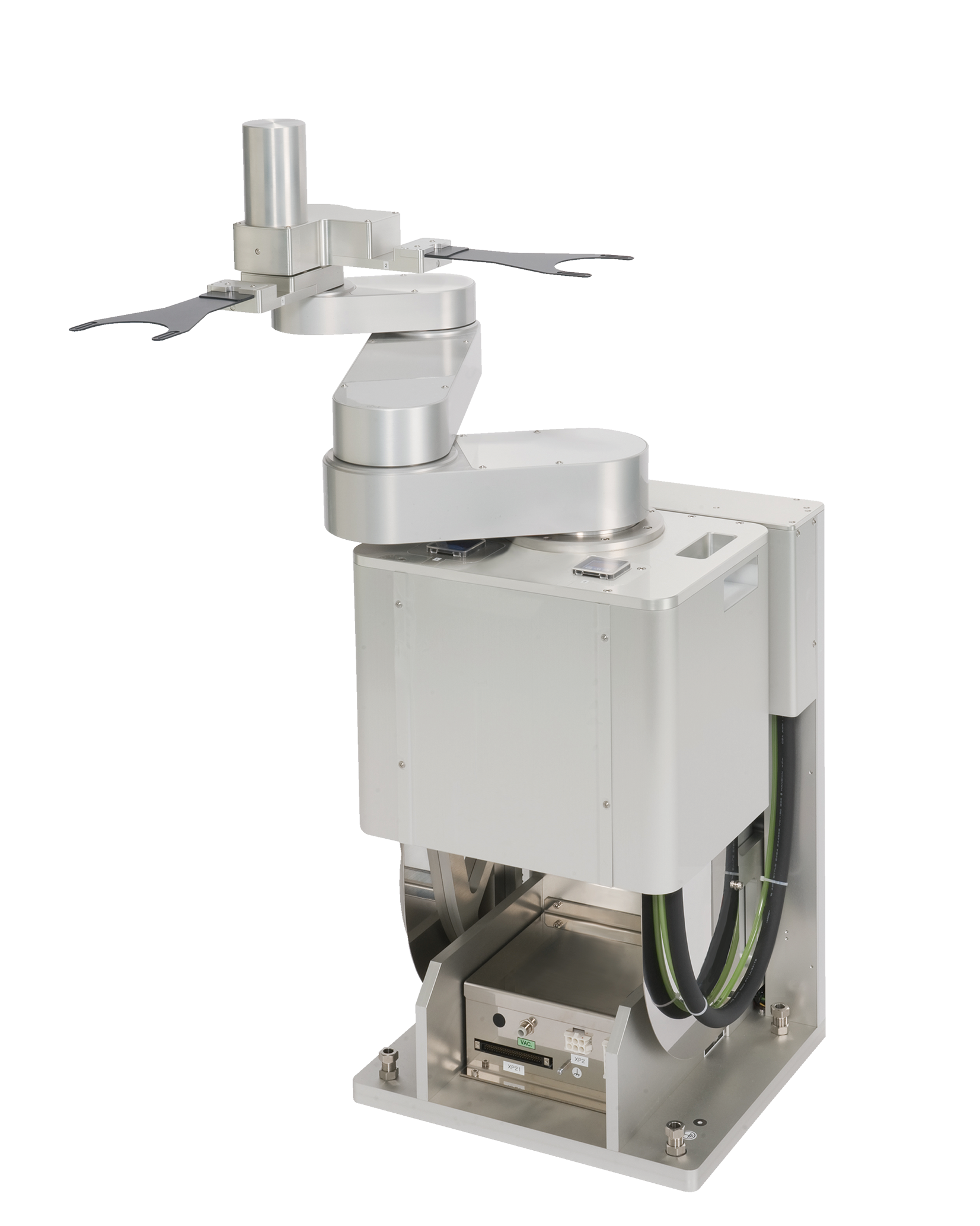
一般环境用搬运机器人
2.png)
PLP对应 伺服电机一般环境用清洁机器人 单
This product is the single robot developed for PLP.
产品特点
###Supported up to max. 650mm square substrate.
###Supported to long stroke elevating.
Specification
- 适用对象
- 角基盤 300~650㎜
- 运动轴
- R轴/T轴/Z轴/S轴
- 运动范围
- R:机械臂最大到达距离 760mm(from swivel center)T:±185degZ:500mmS:2000mm
- 运动时间
- R:1.8sec/Full stroke(-520mm~760mm)T:2.0sec/180degZ:1.5sec/500mmS:2.5sec/2000mm
- 往返精确度
- R:±0.2mmT:±0.03degZ:±0.1mmS:±0.25mm
- 駆动电机
- AC 伺服电机
- 速度控制方式
- S-sharped acceleration/deceleration control
- 通信规格
- RS232C/ETHERNET
- 适用范围
- Power:Supplied from controllerVAC:-80kPa or less 15L/min or moreΦ6 one-touch joint 2 systems
- 质量
- 机器人 Approx.110kg滑动导轨 Approx.220kg
.png)
PLP对应 伺服电机一般环境用清洁机器人 双
This product is the double robot developed for PLP.
产品特点
###Supported up to max. 650mm square substrate.
###Supported to long stroke elevating.
Specification
- 适用对象
- 角基盤 300~650mm
- 运动轴
- R1轴/R2轴/T轴/Z轴/S轴
- 运动范围
- R:机械臂最大到达距离 760mm(from swivel center)T:±185degZ:500mmS:880mm
- 运动速度
- R1轴・R2轴:1.5sec/1175mmT:1.8sec/180degZ:2.0sec/500mmS:1.5sec/880mm
- 往返精确度
- R1轴・R2轴:±0.1mm、T:±0.03degZ:±0.1mmS:±0.25mm
- 駆动电机
- AC 伺服电机
- 速度控制方式
- S-sharped acceleration/deceleration change pulse generator control
- 通信规格
- RS232C/ETHERNET
- 适用范围
- Vacuum:-80kPa or less( Φ6×Φ4 tube one-touch joint connection ) 2systemsPower:Supplied from robot controller.
- 质量
- 机器人 Approx.140kg滑动导轨 Approx.150kg

TT301A 系列 伺服电机一般环境用清洁机器人 TT301A-RA
本制品是应对EFEM开发的低价格,高性能智能传送机器人。
是龙云产品中事先高速传送,高清洁的旗舰版。
产品特点
###对应SEMI F47。
###与常规机相比,提高了零件・规格的共通率,实现了低价位。
###独自的高速替换系统,晶片的替换时间消减了50%。
###采用了新的控制系统,动作更高速平稳。
###与常规机相比运行范围缩小了15%,调节器的容积缩小了50%。
###可对应2FOUP无导轨。可装映射传感器。
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:430㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)Z轴:330㎜
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~230V 7.5A 1系统真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约35kg控制装置(TT301A):约10kg

TT301A 系列 伺服电机一般环境用清洁机器人 TT301A-WA
本制品是应对EFEM开发的低价格,高性能智能传送机器人。
是龙云产品中事先高速传送,高清洁的旗舰版。
产品特点
###对应SEMI F47。
###与常规机相比,提高了零件・规格的共通率,实现了低价位。
###独自的高速替换系统,晶片的替换时间消减了50%。
###采用了新的控制系统,动作更高速平稳。
###与常规机相比运行范围缩小了15%,调节器的容积缩小了50%。
###可对应2FOUP无导轨。可装映射传感器。
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:346㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)Z轴:330㎜
- 往返精确度
- R轴:±0.1㎜ (3σ)T轴:0.02deg (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~230V 7.5A 1系统真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约35kg控制装置(TT301A):约10kg

TT301A 系列 伺服电机一般环境用清洁机器人 TT301A-WB
本制品是应对EFEM开发的低价格,高性能智能传送机器人。
是龙云产品中事先告诉传送,高清洁的旗舰版。
产品特点
###对应SEMI F47。
###与常规机相比,提高了零件・规格的共通率,实现了低价位。
###独自的高速替换系统,晶片的替换时间消减了50%。
###采用了新的控制系统,动作更高速平稳。
###与常规机相比运行范围缩小了15%,调节器的容积缩小了50%。
###可对应2FOUP无导轨。可装映射传感器。
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:250㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)Z轴:330㎜
- 往返精确度
- R轴:±0.1㎜ (3σ)T轴:0.02deg (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~230V 7.5A 1系统真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约34kg控制装置(TT301A):约10kg

TT301A 系列 伺服电机一般环境用清洁机器人 TT301A-SA
本制品是应对EFEM开发的低价格,高性能智能传送机器人。
是龙云产品中事先告诉传送,高清洁的旗舰版。
产品特点
###对应SEMI F47。
###与常规机相比,提高了零件・规格的共通率,实现了低价位。
###独自的高速替换系统,晶片的替换时间消减了50%。
###采用了新的控制系统,动作更高速平稳。
###与常规机相比运行范围缩小了15%,调节器的容积缩小了50%。
###可对应2FOUP无导轨。可装映射传感器。
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:346㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)Z轴:330㎜
- 往返精确度
- R轴:±0.1㎜ (3σ)T轴:0.02deg (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~230V 7.5A 1系统真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约35kg控制装置(TT301A):约10kg
产品特点
###以无导轨方式对应3FOUP。
###通过替换装置,实现了晶圆的高速替换。
###可以有偿选择映射传感器。
###R・T与Z轴可分离的构造,让日常的保养更简单。可以对应大行程的升降高度。
###提升机械臂的刚性,也为您准备了传送450mm晶圆的机型。
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:590㎜(机械臂最大到达距离)T轴:350deg(原点:±175deg)W轴:360deg(原点:±180deg) Z轴:300㎜P轴:180deg
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)P轴:0.02deg (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC208V 5A 1系统 :单相AC100V 7.5A 1系统真空:-80kPa以下 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约50kg控制装置(MCE):约18kg
产品特点
###以无导轨方式对应2FOUP。
###通过替换装置,实现了晶圆的高速替换。
###可以有偿选择映射传感器。
###R・T与Z轴可分离的构造,让日常的保养更简单。可以对应大行程的升降高度。
###提升机械臂的刚性,也为您准备了传送450mm晶圆的机型。
Specification
- 适用对象
- Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:430㎜(机械臂最大到达距离)T轴:350deg(原点:±175deg)W轴:360deg(原点:±180deg) Z轴:300㎜P轴:180deg
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)P轴:0.05deg (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~AC230 5A 1系统Dryair:0.5MPa 150L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约50kg控制装置(MCE):约18kg
产品特点
###以无导轨方式对应2FOUP。
###通过替换装置,实现了晶圆的高速替换。
###可以有偿选择映射传感器。
###R・T与Z轴可分离的构造,让日常的保养更简单。可以对应大行程的升降高度。
###提升机械臂的刚性,也为您准备了传送450mm晶圆的机型。
Specification
- 适用对象
- Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:480㎜(机械臂最大到达距离)T轴:350deg(原点:±175deg)W轴:360deg(原点:±180deg) Z轴:300㎜P轴:180deg
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)P轴:0.1deg (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~AC230 5A 1系统Dryair:0.5MPa 150L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约50kg控制装置(MCE):约18kg

产品特点
###以无导轨方式对应2FOUP。
###通过替换装置,实现了晶圆的高速替换。
###可以有偿选择映射传感器。
###R・T与Z轴可分离的构造,让日常的保养更简单。可以对应大行程的升降高度。
###提升机械臂的刚性,也为您准备了传送450mm晶圆的机型。
Specification
- 适用对象
- Φ300㎜~~Φ450㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:590㎜(机械臂最大到达距离)T轴:350deg(原点:±175deg)W轴:360deg(原点:±180deg) Z轴:300㎜P轴:180deg
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)P轴:0.05deg (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,ETHERNET
- 适用电源
- 电源:单相AC200V~AC230 5A 1系统Dryair:0.5MPa 150L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约50kg控制装置(MCE):约18kg

产品特点
###可以有偿选择映射传感器。
###最佳的软件将装置的活动范围控制在最小,内置型控制器为您节省了空间
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:374㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)Z轴:380㎜
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,RS-485
- 适用电源
- 电源:驱动DC24V±5% 10A :控制DC24V±5% 3.15A真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约35kg控制装置(MCQ):约10kg
产品特点
###以无导轨方式对应2FOUP
###可以有偿选择映射传感器
###最佳的软件将装置的活动范围控制在最小,内置型控制器为您节省了空间
Specification
- 适用对象
- Φ100㎜~Φ300㎜SEMI/JEITA規格晶片
- 运动范围
- R轴:470㎜(机械臂最大到达距离)T轴:370deg(原点:±185deg)W轴:370deg(原点:±185deg) Z轴:380㎜
- 往返精确度
- X,Y方向:±0.1㎜ (3σ)Z轴:±0.05㎜ (3σ)
- 晶圆保持方法
- 可任意选择
- 晶片保持确认
- 数字显示真空传感器
- 控制方式
- RS232C,RS-485
- 适用电源
- 电源:驱动DC24V±5% 10A :控制DC24V±5% 3.15A真空:-80kPa以下 15L/min以上 1系统(Φ6 ×Φ4 聚氨酯管 简易接头 连接)
- 重量
- 本体:约35kg控制装置(MCQ):约10kg
Sales Div.Transfer Business Unit
+81-86-239-5117
+81-86-239-5118
