PRODUCTS製品情報
クリーン搬送システム
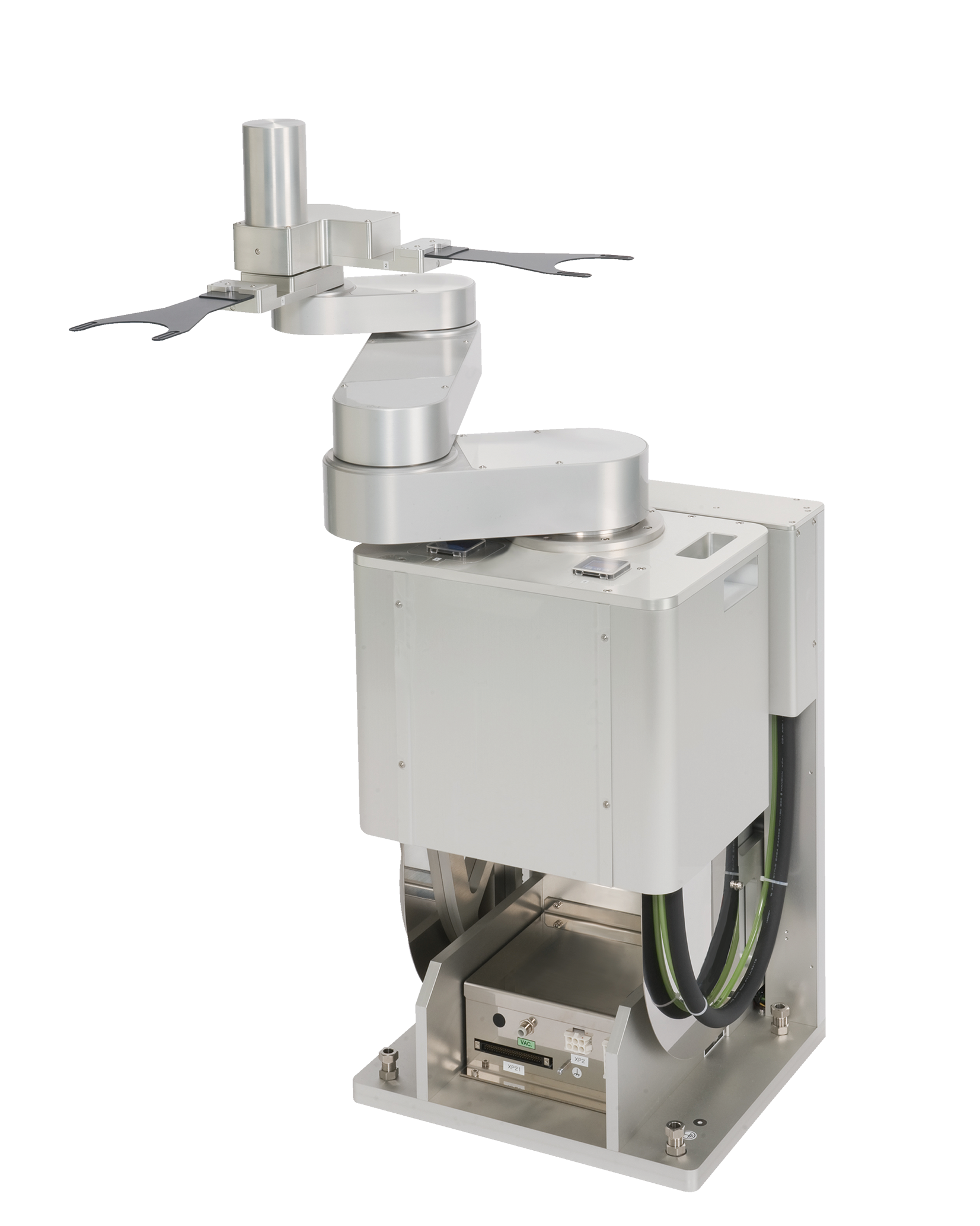
大気搬送ロボット
2.png)
PLP 対応
サーボモーター仕様
大気用クリーンロボット
シングル
本製品は、PLPに特化したシングルアームロボットになります。
製品特徴
###ワークサイズ:最大650mm角基板まで対応しております。
###最大到達距離:1500mmまで対応しております。
製品規格
- 対象ワーク
- 角基盤 300~650㎜
- 動作軸
- R軸/T軸/Z軸/S軸
- 動作範囲
- R:アーム最大到達距離 760mm(旋回中心より)T:±185degZ:500mmS:2000mm
- 動作時間
- R:1.8sec/フルストローク(-520mm~760mm)T:2.0sec/180degZ:1.5sec/500mmS:2.5sec/2000mm
- 繰り返し精度
- R:±0.2mmT:±0.03degZ:±0.1mmS:±0.25mm
- 駆動モーター
- ACサーボモーター
- 速度制御方式
- S字加減速制御
- 通信仕様
- RS232C/ETHERNET
- ユーティリティ
- 動力:コントローラーより供給VAC:-80kPa以下 15L/min以上Φ6ワンタッチ継手 2系統
- 質量
- ロボット 約110kgスライドレール 約220kg
.png)
PLP 対応
サーボモーター仕様
大気用クリーンロボット
ダブル
本製品は、PLPに特化したダブルアームロボットになります。
製品特徴
###ワークサイズ:最大650mm角基板まで対応しております。
###最大到達距離:1500mmまで対応しております。
製品規格
- 対象ワーク
- 角基盤 300~650mm
- 動作軸
- R1軸/R2軸/T軸/Z軸/S軸
- 動作範囲
- R:アーム最大到達距離 760mm(旋回中心より)T:±185degZ:500mmS:880mm
- 動作速度
- R1軸・R2軸:1.5sec/1175mmT:1.8sec/180degZ:2.0sec/500mmS:1.5sec/880mm
- 繰り返し精度
- R1軸・R2軸:±0.1mm、T:±0.03degZ:±0.1mmS:±0.25mm
- 駆動モーター
- ACサーボモーター
- 速度制御方式
- S字加減速度変更方式パネルジェネレータ制御
- 通信仕様
- RS232C/ETHERNET
- ユーティリティ
- 真空:-80kPa以下(Φ6×Φ4チューブ ワンタッチ継手接続)2系統動力:ロボットコントローラーより供給
- 質量
- ロボット 約140kgスライドレール 約150kg

TT301A-RAシリーズ
サーボモーター仕様
大気用クリーンロボット
TT301A-RA
本製品は、EFEM用に開発した低価格、高性能な搬送ロボットです。
高速反動、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###高信頼性設計による18ヶ月保証対象製品です。
###SEMI F47に対応しています。
###従来機より、部品・モジュールの共通化率を高め、低価格を実現しました。
###独自の高速入替機構により、ウェーハ入替時間を50%削減しました。
###新制御システムの採用により、高速で滑らかな動作を実現しました。
###従来機より、ロボットフットプリント15%、コントローラ容積50%のサイズダウンを実現しました。
###2FOUPにレールレスで対応します。
###マッピングセンサーも用意しております。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜ SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:430㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)Z軸:330㎜
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ) Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,ETHERNET
- ユーティリティ
- 電源:単相AC200V~230V 7.5A 1系統 真空:-80kPa以下 15L/min以上 1系統 (Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約35kg コントローラ(TT301A):約10kg

TT301A-WAシリーズ
サーボモーター仕様
大気用クリーンロボット
TT301A-WA
本製品は、EFEM用に開発した低価格、高性能な搬送ロボットです。
高速反動、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###高信頼性設計による18ヶ月保証対象製品です。
###SEMI F47に対応しています。
###従来機より、部品・モジュールの共通化率を高め、低価格を実現しました。
###新制御システムの採用により、高速で滑らかな動作を実現しました。
###従来機より、ロボットフットプリント15%、コントローラ容積50%のサイズダウンを実現しました。
###マッピングセンサーも用意しております。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:346㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)Z軸:330㎜"
- 繰返し精度
- R軸:±0.1㎜ (3σ)T軸:0.02deg (3σ)Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,ETHERNET
- ユーティリティ
- 電源:単相AC200V~230V 7.5A 1系統真空:-80kPa以下 15L/min以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約35kgコントローラ(TT301A):約10kg

TT301A-WBシリーズ
サーボモーター仕様
大気用クリーンロボット
TT301A-WB
本製品は、EFEM用に開発した低価格、高性能な搬送ロボットです。
高速反動、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###高信頼性設計による18ヶ月保証対象製品です。
###SEMI F47に対応しています。
###従来機より、部品・モジュールの共通化率を高め、低価格を実現しました。
###新制御システムの採用により、高速で滑らかな動作を実現しました。
###従来機より、ロボットフットプリント15%、コントローラ容積50%のサイズダウンを実現しました。
###マッピングセンサーも用意しております。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:250㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)Z軸:330㎜
- 繰返し精度
- R軸:±0.1㎜ (3σ)T軸:0.02deg (3σ)Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,ETHERNET
- ユーティリティ
- 電源:単相AC200V~230V 7.5A 1系統真空:-80kPa以下 15L/min以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約34kgコントローラ(TT301A):約10kg

TT301A-SAシリーズ
サーボモーター仕様
大気用クリーンロボット
TT301A-SA
本製品は、EFEM用に開発した低価格、高性能な搬送ロボットです。
高速反動、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###高信頼性設計による18ヶ月保証対象製品です。
###SEMI F47に対応しています。
###従来機より、部品・モジュールの共通化率を高め、低価格を実現しました。
###新制御システムの採用により、高速で滑らかな動作を実現しました。
###従来機より、ロボットフットプリント15%、コントローラ容積50%のサイズダウンを実現しました。
###マッピングセンサーも用意しております。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:346㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)Z軸:330㎜"
- 繰返し精度
- R軸:±0.1㎜ (3σ)T軸:0.02deg (3σ)Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,ETHERNET
- ユーティリティ
- 電源:単相AC200V~230V 7.5A 1系統真空:-80kPa以下 15L/min以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約35kgコントローラ(TT301A):約10kg
ET-MTEシリーズ
サーボモーター仕様
フリーアクセスロボット
ET-MTE
本製品は、φ300mmウェーハに対応した搬送ロボットです。
高速搬送、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###3FOUPにレールレスで対応します。
###チェンジャー機構により、ウェーハの入れ替え動作を高速に行ないます。
###マッピングセンサーも用意しております。
###R・T軸とZ軸が分離構造のため、メンテナンスが容易に行なえ、昇降ロングストロークにも対応可能です。
###アーム剛性をアップさせて、450mmウェーハの搬送にも対応したモデルをラインナップしました。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:590㎜(アーム最大到達距離)T軸:350deg(原点:±175deg)W軸:360deg(原点:±180deg)Z軸:300㎜P軸:180deg
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ)Z軸:±0.05㎜ (3σ)P軸:0.02deg (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,RS-485
- ユーティリティ
- 電源:単相AC208V 5A 1系統 :単相AC100V 7.5A 1系統真空:-80kPa以下 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約50kgコントローラ(MCE):約18kg
MTEシリーズ
サーボモーター仕様
フリーアクセスロボット
MTE-C
本製品は、φ300mmウェーハに対応した搬送ロボットです。
高速搬送、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###2FOUPにレールレスで対応します。
###マッピングセンサーも用意しております。
###R・T軸とZ軸が分離構造のため、メンテナンスが容易に行なえ、昇降ロングストロークにも対応可能です。
###アーム剛性をアップさせて、450mmウェーハの搬送にも対応したモデルをラインナップしました。
製品規格
- 適用ワーク
- Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:430㎜(アーム最大到達距離)T軸:350deg(原点:±175deg)W軸:360deg(原点:±180deg)Z軸:300㎜P軸:180deg
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ)Z軸:±0.05㎜ (3σ)P軸:0.05deg (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,RS-485
- ユーティリティ
- 電源:単相AC200V~AC230V 5A 1系統ドライエア:0.5MPa 150L/min 以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約60kgコントローラ(MCE):約18kg
MTEシリーズ
サーボモーター仕様
フリーアクセスロボット
MTE-D
本製品は、φ300mmウェーハに対応した搬送ロボットです。
高速搬送、高クリーン度を実現するタツモ搬送ロボットのフラグシップモデルです。
製品特徴
###2FOUPにレールレスで対応します。
###マッピングセンサーも用意しております。
###R・T軸とZ軸が分離構造のため、メンテナンスが容易に行なえ、昇降ロングストロークにも対応可能です。
###アーム剛性をアップさせて、450mmウェーハの搬送にも対応したモデルをラインナップしました。
製品規格
- 適用ワーク
- Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:480㎜(アーム最大到達距離)T軸:350deg(原点:±175deg)W軸:360deg(原点:±180deg)Z軸:300㎜P軸:185deg
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ)Z軸:±0.05㎜ (3σ)P軸:±0.1deg (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,RS-485
- ユーティリティ
- 電源:単相AC200V~AC230V 5A 1系統ドライエア:0.5MPa 150L/min 以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約60kgコントローラ(MCE):約18kg

製品特徴
###マッピングセンサーも用意しております。
###最適ソフトウェアにより最適旋回スペースを実現し、コントローラを内蔵して省スペースを実現しました。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:374㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)Z軸:380㎜
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ)Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,RS-485
- ユーティリティ
- 電源:駆動 DC24V±5% 10A :制御 DC24V±5% 3.15A真空:-80kPa以下 15L/min以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約35kg
製品特徴
###2FOUPにレールレスで対応します。
###マッピングセンサーも用意しております。
###最適ソフトウェアにより最適旋回スペースを実現し、コントローラを内蔵して省スペースを実現しました。
製品規格
- 適用ワーク
- Φ100㎜~Φ300㎜SEMI/JEITA規格品ウェーハ
- 動作範囲
- R軸:470㎜(アーム最大到達距離)T軸:370deg(原点:±185deg)W軸:370deg(原点:±185deg)Z軸:380㎜
- 繰返し精度
- X,Y方向:±0.1㎜ (3σ)Z軸:±0.05㎜ (3σ)
- ウェーハ把持方法
- 裏面真空吸着/落とし込み/エッジグリップ/ベルヌーイ
- ウェーハ把持確認
- デジタル表示付き真空センサー
- 制御方法
- RS232C,RS-485
- ユーティリティ
- 電源:駆動 DC24V±5% 10A :制御 DC24V±5% 3.15A真空:-80kPa以下 15L/min以上 1系統(Φ6 ×Φ4 ポリウレタンチューブ ワンタッチ継手接続)
- 重量
- 本体:約35kg
搬送事業 営業課
(086)239-5117
(086)239-5118
